
Autorotacja rozłożona na czynniki pierwsze
Autorotacja stanowi jeden z fundamentów bezpieczeństwa w lotnictwie śmigłowcowym i jest istotną częścią każdego szkolenia. To nie tylko element procedur awaryjnych, dzięki któremu jesteśmy w stanie wylądować podczas awarii silnika czy awarii układu przeniesienia mocy. Autorotacja to także złożone i fascynujące zjawisko, oferujące spojrzenie na zasady aerodynamiki wiropłatów.
W tym artykule opisuję, jak autorotacja nie tylko ratuje nasze życie, ale również wzbogaca naszą wiedzę o lotnictwie śmigłowcowym. Zapraszam do lektury!
Czym jest autorotacja?
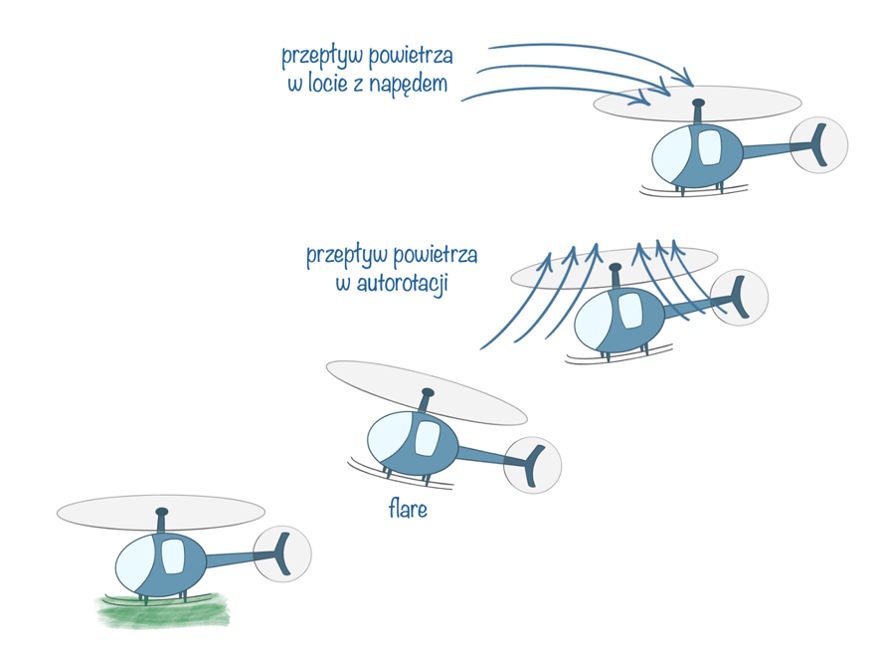
Autorotacja to stan lotu, w którym podczas opadania, wirnik nośny śmigłowca jest napędzany nie przez pracujący silnik, ale przez napływające od dołu strugi powietrza. W odróżnieniu od lotu z napędem, gdzie powietrze napływa na obracające się łopaty od góry, w autorotacji to opadanie śmigłowca względem powietrza powoduje przepływ powietrza przez tarczę wirnika od dołu, utrzymując jego obroty i pozwalając na generowanie siły nośnej. Umożliwia to bezpieczne lądowanie w przypadku całkowitej utraty mocy, czyniąc autorotację jednym z kluczowych elementów procedur awaryjnych w lotnictwie śmigłowcowym. Jej praktyczne opanowanie to niekwestionowana umiejętność każdego, kto samodzielnie wykonuje loty śmigłowcem. Regularne szkolenie z autorotacji, w tym ćwiczenia z różnych wysokości i prędkości, stanowi fundament bezpieczeństwa.
Podstawy mechaniki autorotacji
Autorotacja nie byłaby możliwa, gdyby nie mechanizm w układzie napędowym pozwalający na odłączenie silnika od wirnika. Wolne koło (inaczej sprzęgło jednokierunkowe) umieszczone pomiędzy silnikiem a przekładnią główną umożliwia wirnikowi nośnemu kontynuowanie ruchu obrotowego nawet jeśli napęd silnika przestanie działać. Dzięki temu, w przypadku awarii układu napędowego, pilot może utrzymywać bezpieczny zakres obrotów wirnika. Sprzęgło jednokierunkowe działa na zasadzie przenoszenia momentu obrotowego tylko w jednym kierunku – gdy silnik działa, mechanizm sprzęgła włącza się i przenosi moment obrotowy z silnika na wirnik. W momencie spadku obrotów silnika lub jego zupełnego zatrzymania, sprzęgło rozłącza się, a wirnik obraca się korzystając z efektu autorotacji. Działanie wolnego koła obserwujemy jadąc na rowerze, gdzie koła mogą swobodnie się obracać nawet wtedy, gdy rowerzysta przestaje pedałować. Poniżej znajduje się uproszczony schemat sprzęgła jednokierunkowego. Górna część grafiki przedstawia normalną pracę, a dolna autorotację, gdzie wał wirnika kręci się swobodnie i szybciej niż wał silnika.
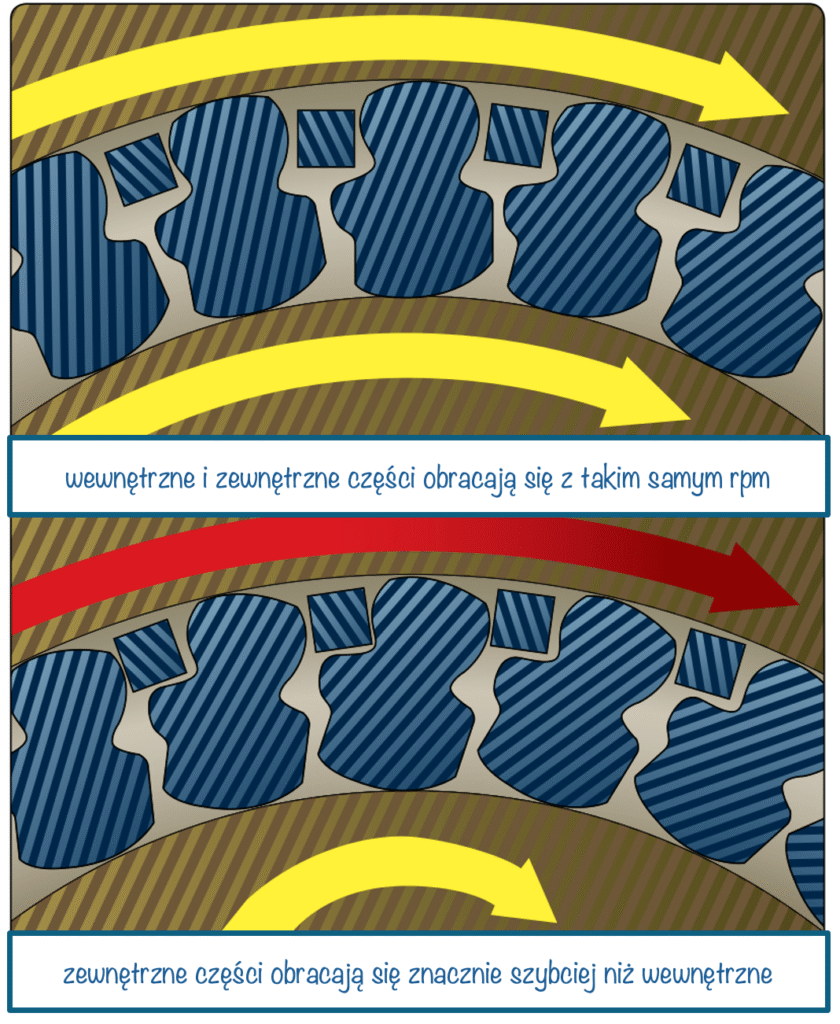
źródło: FAA Helicopter Flying Handbook
Podstawy aerodynamiki autorotacji
Dla wyjaśnienia aerodynamiki autorotacji należy podzielić tarczę obracającego się wirnika nośnego na trzy części. Są to obszary: napędzający, napędzany oraz przeciągnięcia.
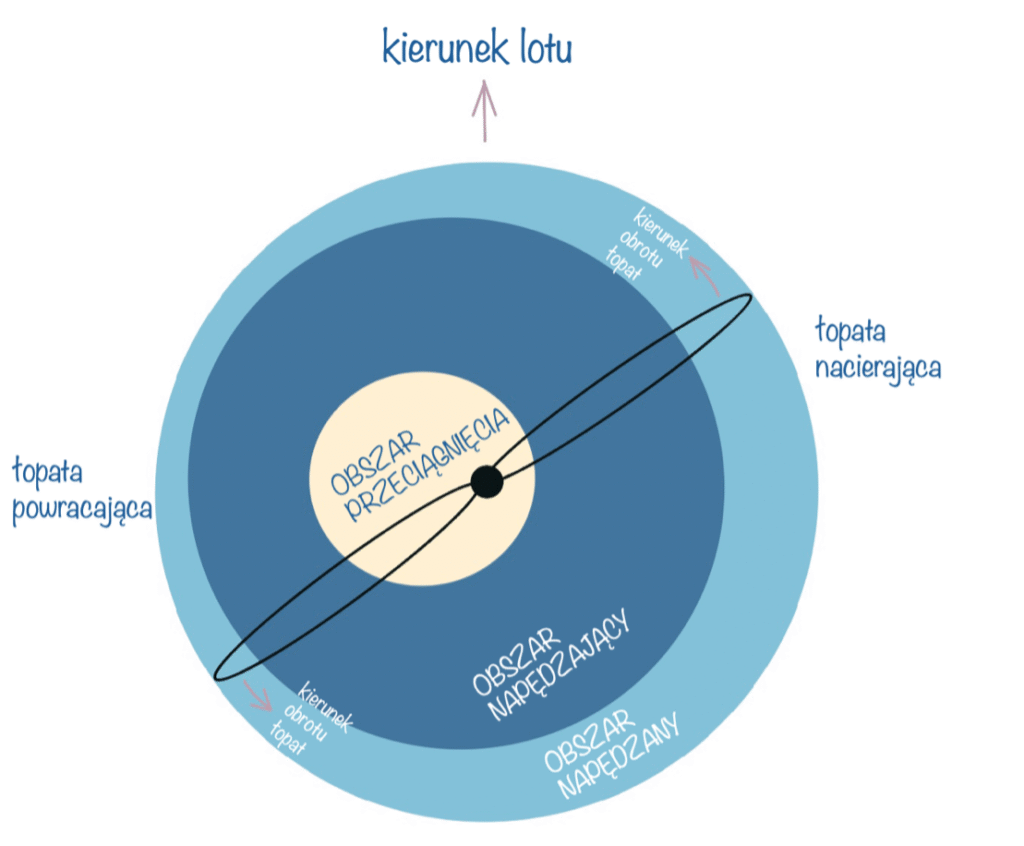
W każdym z tych obszarów występują różne wektory siły. Związane są one głównie z różnicami w prędkości relatywnej napływającego powietrza wynikającego z obrotu łopat – jest ona najniższa przy nasadzie łopaty, a najwyższa przy jej końcówce. Po drugie, występuje także różnica w kącie natarcia wynikająca ze skręcenia łopaty.Obszar napędzany zajmuje około 30% promienia tarczy wirnika i jest ulokowany przy końcówkach łopat. Wytwarza on siłę nośną, jednak występujący opór jest zbyt duży i w rezultacie obszar ten nie przyczynia się do zwiększenia prędkości obracających się łopat. Obszar napędzający (zwany również obszarem autorotacyjnym) to ten, gdzie wypadkowa sił aerodynamicznych skierowana jest do przodu względem osi obrotu i to właśnie ona przyczynia się do przyspieszenia obrotów wirnika. W obszarze przeciągnięcia, kąt natarcia jest zbyt duży i powstały opór sprawia, że rezultatem działających tam sił jest spowolnienie obrotów wirnika.
Podczas autorotacji, zmieniając prędkość obrotową wirnika modyfikujemy wielkość obszaru napędzającego w stosunku do innych. Należy pamiętać, że przy pewnych obrotach wirnika oraz przy zbyt dużej prędkości postępowej (dlatego mamy prędkość maksymalną Vne dla autorotacji), wielkość tego obszaru może być niewystarczająca do wykreowania niezbędnej do bezpiecznego lądowania siły nośnej.
Przesunięcie wszystkich trzech obszarów na lewo od środka osi obrotu wynika z asymetrii siły nośnej, czyli różnicy prędkości łopaty nacierającej i powracającej (na grafice wirnik obraca się przeciwnie do ruchów wskazówek zegara). Kąt natarcia łopaty powracającej jest większy, dlatego zwiększa się obszar przeciągnięcia. Podczas autorotacji wykonywanej pionowo w dół, bez prędkości postępowej, obszary te byłyby ulokowane symetrycznie od środka osi obrotu. To również wyjaśnia kwestię prędkości maksymalnej dla autorotacji – im większą mamy prędkość, tym obszar napędzający przesuwa się bardziej w lewo, a w końcu jego wielkość może być niewystarczająca do utrzymania bezpiecznych obrotów wirnika.
Ale jak to wygląda w praktyce? Prędkość obrotową wirnika nośnego kontrolujemy przede wszystkim za pomocą dźwigni skoku ogólnego. W dużym skrócie – dźwignia w dół obroty się zwiększają, dźwignia w górę obroty maleją. Te manewry zmienią odpowiednio proporcje obszarów napędzanego do napędzającego. Pośrednio na obroty wirnika wpływają także ruchy drążkiem. Wynika to ze zmiany położenia tarczy wirnika. Wykonując ruch drążkiem na siebie, tarcza pochyla się do tyłu, zwiększając tak istotny w autorotacji przepływ powietrza od dołu do góry.
Kolejnym aspektem fizyki autorotacji jest moment obrotowy, a właściwie jego brak (bardziej dociekliwi mogliby powiedzieć, że powstające opory układu napędowego i hydrauliki powodują odwrotny moment, jednak jest on dla obecnej dyskusji pomijalny). W normalnym locie z napędem wirnik nośny wywiera moment obrotowy na śmigłowiec, który powoduje tendencję do obracania się kadłuba w kierunku przeciwnym do obrotu wirnika. Moment ten równoważony jest przez śmigiełko ogonowe (lub inne systemy np. fenestron). W trakcie normalnego lotu z napędem w śmigłowcach z wirnikiem głównym obracającym się przeciwnie do ruchu wskazówek zegara (większość śmigłowców „amerykańskich”) przeciwdziałamy temu zjawisku poprzez wciskanie lewego pedału. Jeśli podczas autorotacji pilot pozostanie przy tym samym ustawieniu pedałów, kadłub będzie obracał się w lewo. Dlatego, by zachować prawidłowe odchylenie, należy w locie bez napędu wcisnąć prawy pedał.
Trening autorotacji jako elementu procedur awaryjnych
Autorotacja stanowi podstawową procedurę awaryjną w przypadku utraty mocy silnika. Z tego powodu jest nieodłącznym elementem szkolenia na każdym typie śmigłowca. Wymaga od pilota szybkiej oceny sytuacji, precyzyjnej koordynacji ruchów oraz ciągłego utrzymywania odpowiednich parametrów. Regularne symulacje tego manewru mają na celu wyrobienie automatycznych reakcji pilota, które mogą zadecydować o życiu załogi i pasażerów w przypadku realnej awarii.
Do elementów autorotacji należą:
- Rozpoznanie awarii.
- Rozłączenie silnika od wirnika – dzięki sprzęgłu jednokierunkowemu zatrzymujący się silnik nie tworzy oporów, a wirnik może obracać się swobodnie.
- Utrzymywanie parametrów, tj. obrotów wirnika poprzez ustawienie dźwigni skoku ogólnego, kierunku oraz prędkości postępowej poprzez ustawienie drążka.
- Wyrównanie (tzw. „flare”) – to końcowy manewr przed przyziemieniem wykorzystujący energię kinetyczną (z prędkości postępowej) do zmniejszenia opadania.
- Lądowanie bez mocy – chwilowe zwiększenie kąta natarcia łopat poprzez podniesienie dźwigni, by wygenerować dodatkową siłę nośną potrzebną do bezpiecznego przyziemienia.
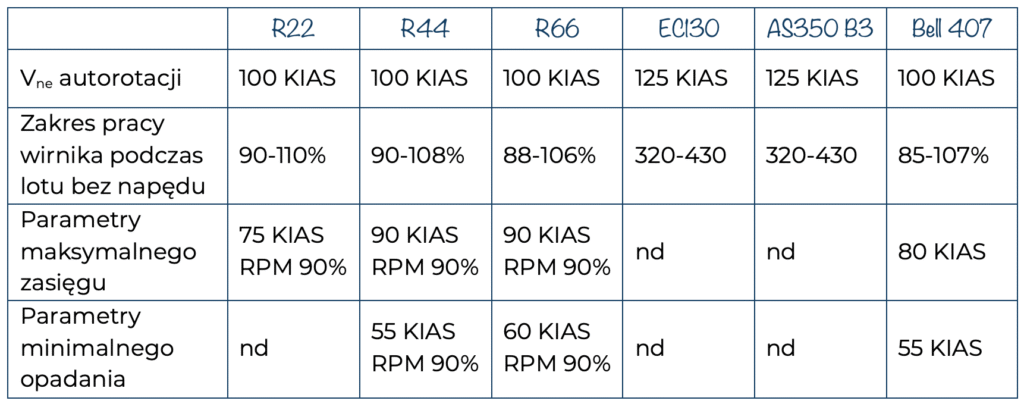
W sytuacji nagłej awarii zespołu napędowego, pilot ma zaledwie sekundy na rozpoczęcie prawidłowej procedury awaryjnej. Procedury te różnią się w zależności od typu śmigłowca. Jednak kluczowym i pierwszym ruchem jest natychmiastowe obniżenie dźwigni skoku ogólnego, aby zmniejszyć kąt natarcia wszystkich łopat wirnika. Konieczny czas reakcji zależy przede wszystkim od inercji wirnika głównego – im większa, tym więcej czasu na reakcję. W lekkich śmigłowcach jest to czasami jedynie 1 lub 2 sekundy. Czasu jest również tym mniej, im więcej używamy w danej chwili mocy. Każdy typ śmigłowca ma inne właściwości autorotacyjne – różnią się one m.in. optymalną prędkością czy bezpiecznym marginesem obrotów wirnika. Poniżej znajdują się najważniejsze parametry autorotacji dla popularnych typów śmigłowców.
I na koniec, warto wspomnieć o najpopularniejszych błędach podczas treningu autorotacji. Według FAA loty szkolne stanowią jedną z głównych kategorii wypadków śmigłowcowych w USA (ok 18%). W tej grupie szczególną uwagę zwraca się na sytuacje, w których przeprowadzany był trening autorotacji – te z kolei odpowiadają za około 13% wypadków w tej kategorii. Przegląd raportów NTSB wskazuje, że główną prawdopodobną przyczyną jest nieutrzymanie prawidłowych obrotów wirnika głównego oraz prędkości postępowej w zakresie określonym w Instrukcji Użytkowania w Locie (IUL), co prowadzi do nadmiernego i niemożliwego do wyprowadzenia tempa opadania.
FAA kładzie nacisk na zapewnienie bezpieczeństwa podczas treningu autorotacji i podkreśla popularne błędy:
- wejście w autorotację na nieprawidłowej wysokości lub z nieprawidłową prędkością;
- wejście w autorotację w locie nieskoordynowanym (z ześlizgiem lub wyślizgiem)
- niewłaściwe użycie pedałów;
- brak korekty na wiatr, co prowadzi do dryfowania śmigłowca;
- brak utrzymania skoordynowanego zakrętu podczas autorotacji 180°;
- brak utrzymania obrotów wirnika w zalecanym przez IUL zakresie;
- zbytnie odchylenie śmigłowca podczas procedury odzyskania mocy;
- nieprawidłowa faza wyrównania („flare”) – zbyt wcześnie lub zbyt późno;
- lądowanie z nieprawidłowym pochyleniem;
- lądowanie z trawersem;
- niewystarczające użycie dźwigni skoku ogólnego w końcowej fazie wyrównania i przyziemienia podczas autorotacji do ziemi;
- zbyt agresywne ruchy sterami podczas przyziemienia w autorotacji do ziemi;
ŹRÓDŁA:
- Coyle Shawn “Cyclic and Collective More Art and Science of Flying Helicopters”
- FAA Helicopter Flying Handbook
- Pilot Operating Handbooks (R22, R44, R66, Bell 407, AS350, EC130)
- Ryan Dale “Helicopter Maneuvers Manual”
- FAA Advisory Circular AC No: 61-140